





ພາລາມິເຕີ H16 H24
1. ພາລາມິເຕີກົນຈັກ
| ໂຄງການ | ພາລາມິເຕີ |
| ການເດີນທາງຂອງແກນ X | 2500 / 3500 ມມ |
| ການເດີນທາງຂອງແກນ Y | 16,000 /24,000 ມມ (ສາມາດປັບແຕ່ງໄດ້) |
| ການເດີນທາງແກນ Z | 150 ມມ |
| ຄວາມໄວໃນການວາງຕຳແໜ່ງສູງສຸດ | 80 ແມັດ/ນາທີ |
| ການເລັ່ງສູງສຸດ | 0.8G |
| ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງກົນຈັກ | +-0.1 ມມ ຕໍ່ 10 ແມັດ |
| ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງຊ້ຳອີກ | +-0.05 ມມ ຕໍ່ 10 ແມັດ |
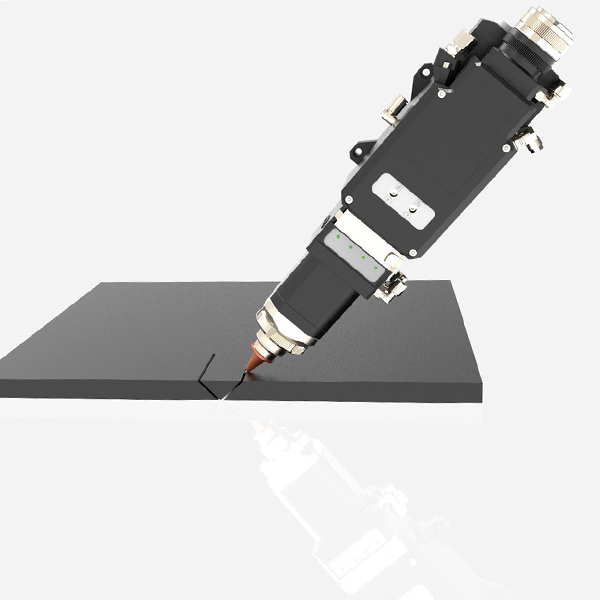
| ພະລັງງານເລເຊີເສັ້ນໄຍ | 6000W-30000W |
| ແຫຼ່ງເລເຊີໄຟເບີ | IPG / nLIGHT / Raycus / Max |
| ນ້ຳໜັກຂອງໂຕະເຮັດວຽກ | 350 ກິໂລກຣາມ/ມ^2 |
| ອະວະກາດ | 19648 ມມ * 6034 ມມ |

